
Morphologische Maschinen
Wenn Produkte durch ihre physische Formänderung multifunktional werden.
Immer mehr Einzelprodukte verschwinden vom Markt und verschmelzen zu multifunktionalen Lösungen. Was früher als separate Geräte wie Faxgerät, Kopierer, Telefon und Scanner erhältlich war, ist heute in einem einzigen Produkt vereint, das zudem nur einen Bruchteil der früheren Kosten verursacht. Ein Beispiel dafür ist das moderne Smartphone, das dutzende von Produkten in sich vereint – vom Kompass über Taschenrechner und Lampe bis hin zu Büchern, MP3-Player, DVD-Player, Foto- und Videokamera sowie GPS-Tracker.
Diese Multifunktionalität spielt sich in der Regel auf dem Display ab, während die äußere Form des Produkts meist unverändert bleibt. Doch was wäre, wenn ein Produkt oder eine Maschine nicht nur multifunktional wäre, sondern zusätzlich auch seine Form verändern könnte?
Dieses Projekt aus meiner Studienzeit ist ein konzeptioneller Ansatz, der sich mit einer Reihe faszinierender Fragen auseinandersetzt: Wie kann Multifunktionalität durch Formveränderung erreicht werden? Welche Grundform ermöglicht es, eine Vielzahl von Anordnungen und Formen zu generieren? Wie beeinflusst diese Formveränderung die Funktion des Geräts? Welche neuen Aufgaben könnten dadurch erfüllt werden? Wie reagieren Menschen auf solche Geräte? Und inwieweit kann eine Maschine, die wie ein Lebewesen wirkt, eine emotionale Verbindung aufbauen?
Diese Fragen eröffnen spannende Forschungsfelder, die eine intensivere Grundlagenforschung erfordern. Leider konnten wir aufgrund der begrenzten Zeit eines Semesters nicht alle Fragen zu unserer vollsten Zufriedenheit beantworten. Dennoch bietet das Projekt wertvolle Einblicke und Ansätze, die das Potenzial für weiterführende Untersuchungen aufzeigen.
Wie es zu diesem Projekt kam
Die Grundidee zu diesem Projekt (Morphrob) entstand während meiner Semesterferien. Damals setzte ich mich intensiv mit der Idee formwechselnder Maschinen auseinander und experimentierte dabei mit verschiedenen geometrischen Formen. Das Ergebnis dieser Überlegungen war eine modulare Einzelform, die sich in Kombination mit weiteren Modulen zu größeren Anordnungen zusammensetzen lässt.
Im nächsten Schritt entwickelte ich einen Papierfunktionsprototypen, der mit Mikro-Servos-Motoren ausgestattet war. Dieser Prototyp diente als Grundlage, um im folgenden Semester das Experiment in ein vollwertiges Projekt zu überführen. Das Endergebnis war ein tragbarer, formverändernder Personal Computer, der die ursprünglichen Ideen zur Multifunktionalität durch Formveränderung auf innovative Weise umsetzt.

Funktionsfähiger Papier-Prototyp
Der Flexible Personal Computer (FPC)
Normalerweise entsteht eine Produktidee aus der Analyse der Bedürfnisse einer spezifischen Nutzergruppe. Doch es gibt auch den umgekehrten Ansatz: Zuerst wird eine Technologie entwickelt, und anschließend wird nach einer geeigneten Anwendung gesucht. Diese Herangehensweise findet häufig in der Bionik Anwendung. Die Bionik überträgt Phänomene aus der Natur auf technische Systeme, indem sie zunächst Erkenntnisse aus der Grundlagenforschung biologischer Systeme gewinnt und anschließend nach möglichen Produktanwendungen sucht.
Im Laufe des Semesters wurde der ursprüngliche Papier-Prototyp weiterentwickelt und das folgende Konzept ausgearbeitet: Morphrob ist ein modularer, formverändernder Personal Computer, der alltägliche Aktivitäten erleichtern soll. Ähnlich wie ein Smartphone, das viele verschiedene Gerätefunktionen vereint, fungiert dieser Roboter als physische Universalmaschine. Der große Vorteil gegenüber herkömmlichen Produkten liegt in seiner Fähigkeit, sowohl virtuell als auch physisch flexibel zu agieren. Diese Kombination aus virtueller und physischer Anpassungsfähigkeit eröffnet neue Möglichkeiten, um die Interaktion mit Technologie noch intuitiver und effizienter zu gestalten.

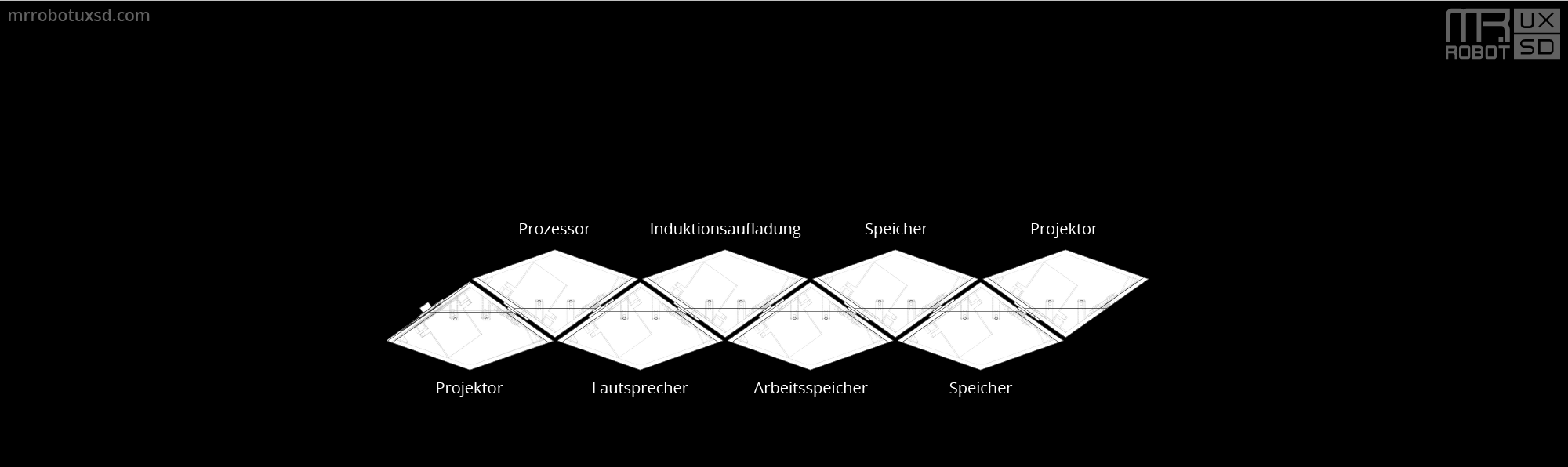
Der Aufbau des Roboters basiert auf modularen Komponenten, die nach Belieben durch Magnetverbindungen zusammengesteckt werden können. Diese Module lassen sich flexibel mit verschiedenen Technologien ausstatten oder nachträglich aufrüsten, wie etwa mit Festplattenerweiterungen, Kameras, Projektoren für Tastatur- und Displayanzeige und mehr.
Bei einer Anordnung von acht Modulen kann der Roboter sich zu einem Würfel formen – längere Kombinationen sind ebenfalls möglich. Durch das Anbringen eines Projektors an beiden Enden verwandelt sich der Roboter in einen voll funktionsfähigen Personal Computer. Diese modulare Flexibilität erlaubt es dem Benutzer, das Gerät nach seinen individuellen Bedürfnissen anzupassen und zu erweitern.

Aufgrund des begrenzten zeitlichen Rahmens waren bei unserem Prototyp die einzelnen Module so konstruiert, dass sie untrennbar miteinander verbunden sind. Idealerweise sollten die Module jedoch lose und durch Magnetverbindungen flexibel miteinander kombinierbar sein. Diese Flexibilität hätte allerdings eine längere Entwicklungszeit erfordert, da die Konstruktion der Schnittstellen zwischen den Modulen in diesem Fall deutlich komplexer wäre.
Die Konstruktion selbst, das Zusammenspiel der sieben Servomotoren und vor allem die Programmierung stellten eine erhebliche Herausforderung dar. Trotz der Komplexität des zweiten Prototyps bleiben jedoch noch viele Fragen und Probleme zu klären. Die bisherigen Prototypen verdeutlichen jedoch bereits eindrucksvoll die Dynamik und die potenzielle Wirkung von formverändernden Maschinen auf den Benutzer.

Unterschiedliche Bewegungsmuster mit acht Modulen.
Der Morphrob in Aktion
Während der Semesterausstellung entstand folgendes Video, das den Morphrob in Aktion zeigt. Die Ausstellung, in der Studenten ihre Semesterarbeiten der Öffentlichkeit präsentieren, ähnelt einer Mini-Messe. Die Reaktionen der Besucher auf den Morphrob waren vielfältig und äußerst interessant. Viele Besucher zeigten sich überrascht, begeistert oder zumindest interessiert. Allerdings gab es auch Reaktionen, die von Angst oder sogar Ekel geprägt waren. Einige Besucher assoziierten die Maschine mit ihren Ängsten gegenüber Schlangen, was dazu führte, dass sich manche Personen nicht einmal in die Nähe des Roboters wagten und einen „Sicherheitsabstand“ von 2 Metern einhielten – dennoch konnten sie ihren Blick kaum von ihm abwenden.
Die Kommentare reichten von „cool“ und „niedlich“ bis hin zu „eklig“. Diese unterschiedlichen Reaktionen zeigten eindrucksvoll, wie stark formverändernde Maschinen Emotionen hervorrufen können. Leider bietet die begrenzte Zeit eines Semesters nicht die Möglichkeit, solche Sozialexperimente in einem größeren Umfang durchzuführen, doch die Ausstellung bot wertvolle Einblicke in die menschliche Wahrnehmung und Reaktion auf innovative Technologien wie den Morphrob.
Durch die markante Formänderung entstehen faszinierende visuelle Effekte, die den Morphrob besonders auszeichnen. Diese außergewöhnliche Beweglichkeit verdankt der Roboter vor allem der 45-Grad-planaren Verschiebung der Drehachse, die es ihm ermöglicht, in kürzester Zeit überraschende Bewegungsmuster zu erzeugen. Innerhalb weniger Augenblicke kann er sich von einer kompakten Form in einen „offenen“ Zustand versetzen. Diese Veränderung der Form eröffnet ihm ganz neue Funktionalitäten. Beispielsweise könnte der Roboter dadurch unterschiedliche Fortbewegungsarten annehmen, was seine Einsatzmöglichkeiten erheblich erweitert.
Einige Szenarien für den Flexible Personal Computer
Der Einsatz eines formverändernden Geräts wie dem Flexible Personal Computer (FPC) bietet eine Vielzahl von Anwendungsmöglichkeiten. Im Rahmen unseres Projekts haben wir verschiedene Alltagsszenarien entwickelt, um diese Potenziale zu veranschaulichen. Zur Darstellung dieser Szenarien nutzten wir die Technik des Stop-Motion-Films, die sich hervorragend eignet, um eine Idee schnell und anschaulich zu visualisieren.
Die Module des Morphrob wurden hierfür aus Pappe nachgebaut. Jedes Modul wurde mit zwei Magneten versehen, die es ermöglichen, die Module flexibel und stabil miteinander zu verbinden. Dank dieser Magnetverbindungen lassen sich unterschiedliche Winkelpositionen einfach realisieren, ohne dass aufwendige Mechanik erforderlich ist. Für den Stop-Motion-Film wurde das Pappmodell nach jeder kleinen Positionsänderung fotografiert, wodurch schließlich ein Video aus der langen Bildsequenz entstand. Diese Methode ermöglichte es uns, die Vielseitigkeit und Anpassungsfähigkeit des FPC auf einfache, aber effektive Weise zu demonstrieren.
Physischer Wecker
Tischleuchte
Der Morphrob kann flexibel zur Tischleuchte umfunktioniert werden und dabei sogar den Bewegungsabläufen des Benutzers folgen. Die Lichtintensität, der Einstrahlwinkel, die Leuchtfarbe und weitere Parameter sind individuell einstellbar. Ein zusätzlicher Vorteil des FPC liegt in seiner Formanpassungsfähigkeit: Er kann sich dem freien Raum in einer Tasche anpassen und dabei Formen vom Würfel bis hin zu einem Stab annehmen. Sollte in der Tasche kein Platz sein, kann sich der Roboter um die Trageschlaufe schlängeln.
Das Video zu dieser Funktion ist in Bearbeitung. Darüber hinaus können mehrere Morphrobs zu einer Stehleuchte kombiniert werden. Mit einer entsprechenden Vorrichtung an der Decke lassen sich die Roboter zu einer Deckenbeleuchtung formen, die nach Belieben ihre Gestalt verändern kann.
Video-Konferenz
Ausgestattet mit einer Kamera, erleichtert der FPC Videogespräche erheblich. Die Drehbewegungen der Module ermöglichen es dem Roboter, dem Gesprächspartner zu folgen. Dieser kann sich frei bewegen und gleichzeitig seinen Aktivitäten nachgehen. Auch hierzu ist ein Video in Bearbeitung.
Fazit
Immer mehr Roboter finden ihren Weg in den Alltag, auch wenn diese Technologie noch in den Anfängen steckt. Eine zentrale Frage bleibt, inwieweit die Gesellschaft solche Maschinen akzeptiert und wie Menschen auf verschiedene Robotertypen reagieren. Der Morphrob ist nur eine von vielen Roboterformen, aber eine besonders extreme. Er weckt starke Emotionen, und eine weitere Untersuchung in diesem Bereich wäre äußerst spannend.
Vorgelegt von:
Fatih Aydemir, Caterina Huber, Feyyaz Cakir
Hochschule für Gestaltung
Schwäbisch Gmünd University of Applied Sciences
Interaktionsgestaltung || Bachelor of Arts
Invention Design Wintersemester 2012/13
www.hfg-gmuend.de